
(New.oto-hui.com) – Cảm biến góc xoay thân xe là loại cảm biến vô cùng quan trọng trong những công nghệ tiện ích trên ô tô. Cung cấp cho người lái tính tiện nghi, độ an toàn và khả năng kiểm soát tốt khi đang lái xe.
Cảm biến góc xoay thân xe (Yaw-rate Sensor) giúp duy trì sự cân bằng, ổn định cho một chiếc xe và nó là thành phần không thể thiếu trong hệ thống cân bằng điện tử ESP. Chúng ta sẽ cùng tìm hiểu:
- Vị trí lắp đặt của cảm biến góc xoay thân xe
- Cấu tạo, nguyên lý hoạt động cảm biến góc xoay thân xe
- Sự giao tiếp của cảm biến với các hộp điều khiển khác trên xe.

1. Vị trí của cảm biến góc xoay thân xe (Yaw-rate sensor):
Cảm biến góc xoay thân xe thường được lắp đặt dưới ghế tài xế, dưới ghế hành khách hoặc tại bảng điều khiển trung tâm. Nó được đặt sát dưới sàn xe để tối ưu việc tiếp cận với trọng tâm của thân xe.
2. Cấu tạo cảm biến góc xoay thân xe (Yaw-rate sensor):
Cảm biến góc xoay thân xe là một dạng kết hợp giữa những cảm biến giúp ghi nhận tốc độ và độ nghiêng của xe, tiêu biểu như cảm biến gia tốc và cảm biến góc xoay thân xe có kích thước nhỏ được tích hợp trong cùng một hộp điều khiển độ lệch hướng. Hai loại cảm biến này có vai trò giúp xe luôn luôn duy trì sự ổn định và đảm bảo bánh xe có đủ độ bám với mặt đường.

3. Nguyên lý hoạt động của cảm biến góc xoay thân xe (Yaw-rate sensor):
Cảm biến gia tốc và cảm biến góc xoay thân xe đều sử dụng nguyên lý cảm biến áp điện giúp biến đổi áp suất thành tín hiệu điện nhờ sự di chuyển vào ra của các bản cực.
Cảm biến góc xoay thân xe thì có cấu tạo đặc biệt hơn bao gồm hai mảng cảm biến. Phần khung sẽ di chuyển lên xuống nhờ vào những lò xo gấp, khi xe di chuyển lò xo gấp sẽ di chuyển phần khung tác dụng lên hai điện cực khung bên ngoài nhằm xác định việc xe đang di chuyển thẳng.
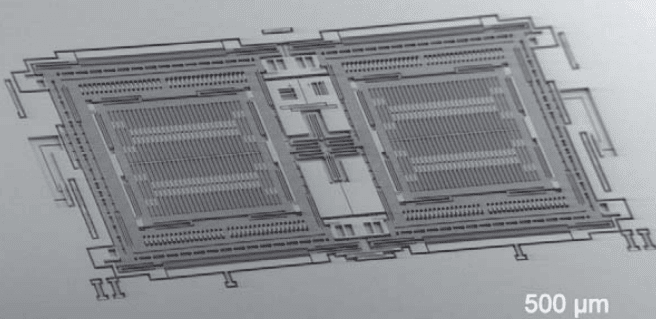
Các phần bản cực phía trong của hai mảng cảm biến trung tâm chuyển động ngang khi xe bắt đầu có hiện tượng đổi hướng nhờ có một lực quán tính sinh ra do khối lượng của mảng cảm biến – lực này gọi là lực Coriolis. Độ lệch giữa bản cực cảm biến trái và phải sẽ được hộp điều khiển lệch hướng ghi nhận và tín hiệu điện nào sẽ được hộp thu nhận sử dụng để điều khiển các cơ cấu dẫn động khác.
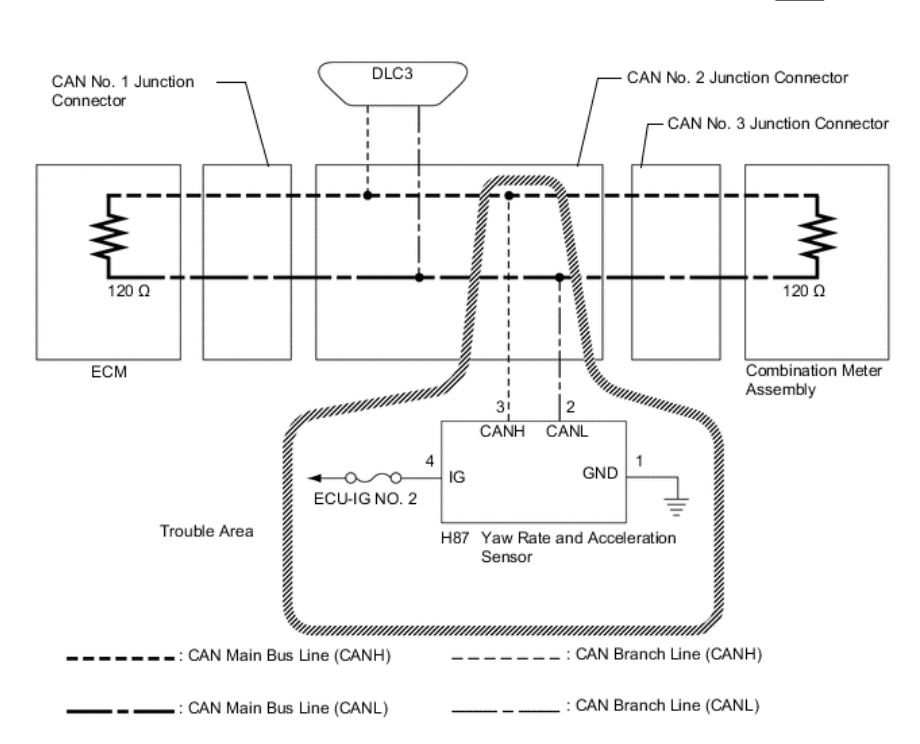
4. Giao tiếp với các hộp điều khiển:
Thông tin từ cảm biến góc xoay thân xe sẽ được gửi đến các hộp điều khiển khác thông qua mạng CAN trên ô tô. Các hộp điều khiển như hộp điều khiển động cơ hoặc hộp điều khiển phanh ABS sẽ ghi nhận các thông tin. Các thông tin này có thể được chia thành hai dạng:
- Thông tin điều kiện thực tế của xe: tốc độ bánh xe, góc nghiêng và gia tốc của xe…
- Thông tin điều kiện mong muốn của tài xế: góc lái, vị trí bàn đạp chân ga, vị trí bàn đạp chân phanh…
Bằng cách so sánh tỷ lệ lệch hướng trong thực tế với tỷ lệ điều kiện mong muốn của tài xế để xác định được xe đang bị thiếu lái, thừa lái hoặc áp suất phanh còn thiếu. Hộp điều khiển ABS, ESP sẽ xác định áp suất dầu phanh thích hợp cần được áp dụng hoặc hộp điều khiển động cơ sẽ giảm công suất động cơ tương ứng.
Bài viết liên quan:
- Cơ sở lý thuyết của hệ thống cân bằng điện tử ESP
- Tìm hiểu về mạng giao tiếp CAN trên ô tô
- Tổng quan các loại cảm biến trên ô tô