Nguyên lý hoạt động của Hệ thống giữ làn đường – Lane Keeping System (Phần 2)
(News.oto-hui.com) – Sau khi tìm hiểu chi tiết về cấu tạo, trong bài viết này sẽ cung cấp kiến thức đầy đủ để bạn hiểu rõ nguyên lí hoạt động và cách sử dụng hệ thống giữ làn đường – Lane Keeping System.
A. Cấu tạo hệ thống giữ làn đường – Lane Keeping System:
=> Xem tại đây: Cấu tạo chi tiết LKS
B. Nguyên lí hoạt động:
- Lưu ý: Bài viết này chỉ ứng dụng trên công nghệ Lane Keeping System của Volkswagen.
I. Trạng thái hoạt động:
1. Bật/ Tắt hệ thống:
– Hệ thống được bật/tắt thông qua nút nhấn ở cần gạt bên trái của vô lăng.

- Khi nút được nhấn, màn hình hiển thị trước vô lăng sẽ hiện ra danh sách tùy chọn (thường ở xe Volkwagen thì nút này là nút bật/tắt chung cho các hệ thống hỗ trợ người lái (ASSIST SYSTEM).
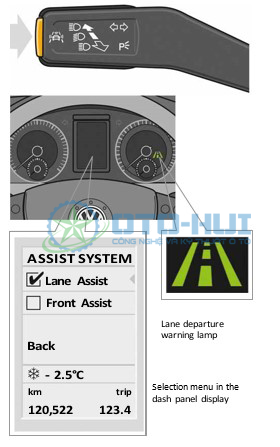
- Hoặc có thể sử dụng các nút điều hướng ở phía trên vô – lăng để chọn hệ thống thích hợp.
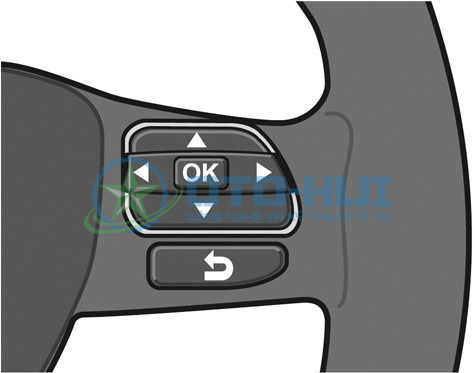
- Nếu giữ chết nút bật/tắt trên 2 giây thì tất cả các tùy chọn được cùng bật hoặc cùng tắt (ở hình là 2 tùy chọn).
2. Hoạt động của hệ thống sau khi bật:
– Khi kích hoạt hệ thống bằng nút nhấn, hệ thống sẽ thực hiện các bước sau:
- Kích hoạt máy ảnh và ghi nhận các dấu hiệu làn đường mà xe đang chạy.
- Đánh dấu vị trí trung tâm làn xe.
- Đánh dấu vị trí xe trong làn xe.
– Khi hệ thống thực hiện tất cả các bước trên thành công đồng nghĩa với hệ thống cảnh báo sai lệch làn đường ở trạng thái chủ động (đèn báo sẽ sáng xanh), ngược lại hệ thống sẽ ở trạng thái bị động.
3. Trạng thái bị chủ động/ bị động:
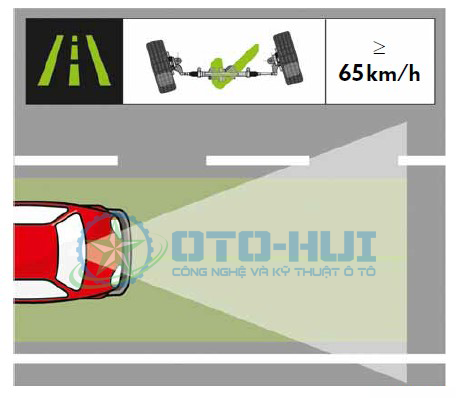
– Ở chế độ chủ động, quá trình đường được ghi nhớ và điều chỉnh mô-men xoắn thông qua tay lái trợ lực điện nếu xe sắp rời khỏi làn đường đã được tính toán.
- Chế độ hoạt động được biểu thị bằng đèn cảnh báo chệch làn đường màu xanh lá cây trong bảng điều khiển.
– Ở chế độ thụ động, đường tiếp tục được ghi nhớ và được tính toán, để chuyển về chế độ chủ động khi phát hiện ranh giới làn đường rõ ràng hoặc khi đáp ứng tất cả các điều kiện cần thiết.
- Hệ thống cảnh báo chệch làn đường tạm thời được chuyển sang chế độ thụ động bằng cách kích hoạt tín hiệu rẽ.
- Nó tự động bật lại khi tắt tín hiệu rẽ và khi có thể phân định làn đường rõ ràng, đèn chỉ thị màu vàng xuất hiện trong màn hình điều khiển.

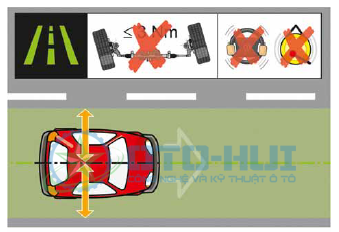
a. Trên đường thẳng:
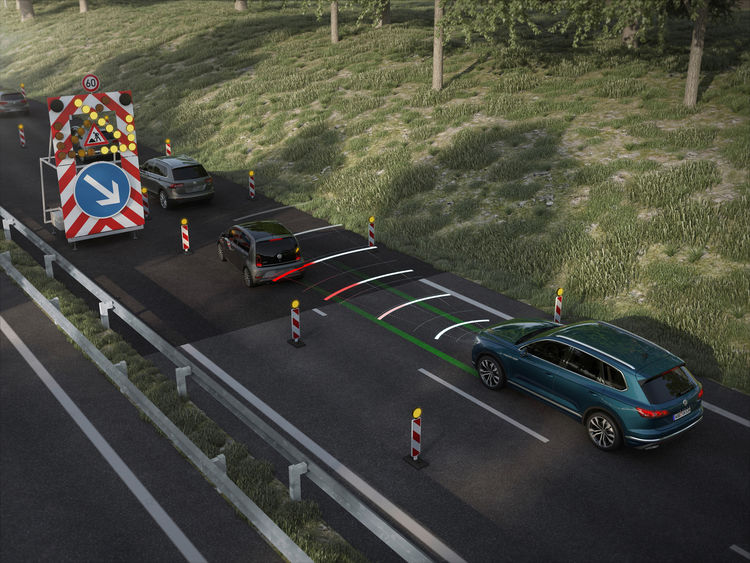
– Hệ thống sử dụng các dấu được đánh trên đường để tính toán làn đường ảo mà phương tiện được phép di chuyển và xác định vị trí của xe trên con đường.
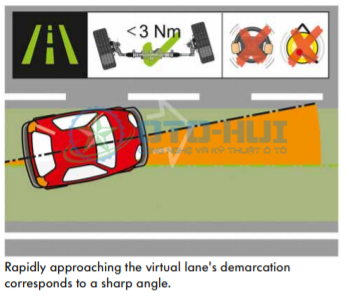
– Nếu xe rời khỏi làn đường ảo, hệ thống sử dụng mô-men xoắn tối đa 3Nm, chống chuyển động lệch của xe và được thực hiện bởi hệ thống lái điện. Lực này được định hướng theo góc mà xe đang di chuyển về phía phân định làn đường được công nhận.
– Việc điều chình tay lái có thể lên đến 100s.
– Sự xen vào có thể được người lái “ghi đè” bằng quy trình lái chủ động.
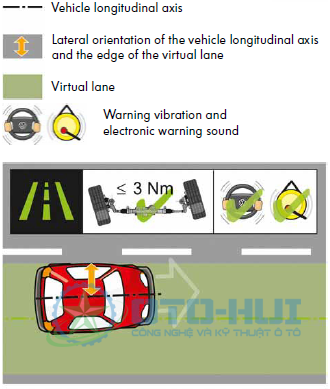
– Nếu mô-men lái điều chỉnh không đủ để duy trì trong làn đường, rung động tay lái được tạo ra thông qua động cơ trợ lực điện cơ. Người lái có thể cảm tháy điều này như cảnh báo vô lăng.
b. Trên đường cong:
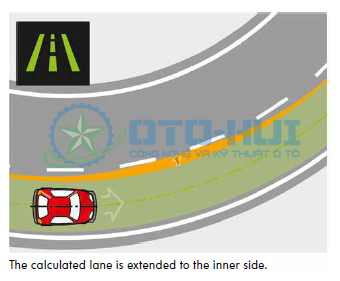
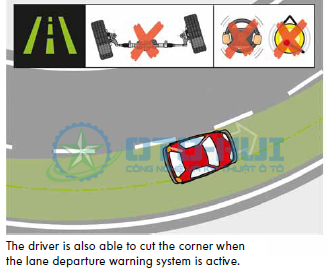
– Trong trường hợp bán kính đường cong lớn, hệ thống cảnh báo có thể tránh đi lệch làn với làn đường được tính toán. Ở trường hợp này, làn đường ảo được hệ thống vạch ra nhỏ hơn, sau đó vùng làm đường ảo sẽ mở rộng ra cho bằng đường thật khi mà vạch kẻ đường thật được xác định. Điều này cho phép người lái xe cắt cua nhỏ mà không cần hệ thống cảnh báo can thiệp.
– Nếu thời gian điều chỉnh của hệ thống vượt 100s mà không giữ đủ xe trong vòng cua, báo động rung âm thanh và xuất hiện hiển thị trên bảng điều khiển thì người lái sẽ tiếp quản quá trình lái.
4. Tín hiệu cảnh báo và phản ứng của hệ thống giữ làn đường theo điều kiện lái xe:
– Qua các thông báo và màn hình hiển thị, người lái có thể tương tác với hệ thống giữ làn đường.
– Khi hệ thống cảnh báo xe lệch làn đường hoạt động (đưa ra tín hiệu) thì chế độ của hệ thống mà xe đang hoạt động được thể hiện bằng đèn thông báo và bảng thông báo cách điều khiển xe về lại đúng làn đường cũng sẽ được hiển thị một cách nhanh chóng.
- Các chế độ này thì được hỗ trợ cả bằng âm thanh cảnh báo và sự rung của vô lăng.
- Với mục đích giúp tài xế chú ý đến thông điệp mà hệ thống đang cảnh báo.
| Tình huống cụ thể | Biểu hiện/Phản ứng | Thông điệp được thông báo |
| Hệ thống đang tắt. | Đèn thông báo tắt. | Không có thông báo. |
| Công tắc hệ thống đang được bật và đang ở chế độ chủ động. | Đèn thông báo sẽ sáng màu xanh lá. | Không có thông báo. |
| Hệ thống đang bật và đang ở chế độ bị động. | Đèn thông báo sẽ sáng màu vàng. | Không có thông báo. |
| Tốc độ xe nhỏ hơn 60km/h. Từ tín hiệu camera thu được thì hệ thống sẽ tính toán được độ rộng của làn đường nhỏ hơn 2.45m hoặc rộng hơn 4.6m. Tỉ lệ giữa phần có màu và phần không có màu của làn đường lớn hơn 1:2. Không có vạch phân làn đường hoặc vạch phân làn đường không thể bắt được. | Đèn thông báo sẽ sáng màu vàng. Hệ thống ở chế độ bị động. Không có âm thanh cảnh báo. | Không có thông báo. |
| Tài xế thực hiện đánh lái mà không bật đèn tín hiệu, điều này có nghĩa hệ thống vẫn đang hoạt động và hệ thống sẽ hiểu rằng xe đang đánh lái vượt quá cho phép. Vạch phân làn đường bị che mất (bụi bẩn, nước, lá cây) được hệ thống phát hiện. Khi vào cua, bán kính góc cua nhỏ hơn 250m, điều này dẫn đến việc camera đã không còn khả năng phát hiện được chính xác được làn đường bởi vì sự uốn cong của đường. | Đèn thông báo sẽ sáng màu vàng. Hệ thống ở chế độ bị động. Không có âm thanh cảnh báo. | Không có thông báo. |
| Kính chắn gió bị bẩn ở phần mà camera hoạt động. | Đèn thông báo sẽ sáng màu vàng. Hệ thống ở chế độ bị động. Phát ra âm thanh cảnh báo. | Hệ thống cảnh báo khi xe đi lệch làn không dùng được.(Lane departure warning system not available.) Không có cảm biến tiệm cận(visibility) ở thời điểm hiện tại. |
| Xe có nguy cơ bắt đầu lệch khỏi làn đường. Sự can thiệp vào hệ thống lái sẽ được thực hiện bởi hệ thống. Tuy nhiên thời gian đánh lái đúng tối đa là 100 giây thì không đủ. | Đèn thông báo sẽ sáng màu vàng. Hệ thống ở chế độ bị động. Phát ra âm thanh cảnh báo. Cảnh báo rung vô lăng. | Xin khống chế lại tay lái (Please take over steering!) |
| Xe có nguy cơ lệch khỏi làn đường. Sự can thiệp vào hệ thống lái sẽ được thực hiện bởi hệ thống. Moment xoắn đã đạt tới mức chính xác cho phép khi đánh lái là 3Nm nhưng lại không đủ để làm xe quay lại lộ trình ban đầu. | Đèn thông báo sẽ sáng màu vàng. Hệ thống ở chế độ bị động. Cảnh báo rung vô lăng. | Xin khống chế lại tay lái (Please take over steering!) |
| Phần điều khiển của hệ thống không hoạt động. Camera không được canh chỉnh (Không hoặc canh chỉnh sai với dữ liệu cơ bản của hệ thống). Phần điều khiển của hệ thống không nhận được tín hiệu của phẩn điều khiển lực vô lăng. | Đèn thông báo sẽ tắt. Phát ra âm thanh cảnh báo. | Hệ thống lỗi (System error). |
| Hệ thống bị quá nhiệt. Điện áp cung cấp vào hệ thống thấp. | Đèn thông báo sẽ sáng màu vàng. Phát ra âm thanh cảnh báo. | Hệ thống cảnh báo khi xe lệch làn đường hiện tại không dùng được (Lane departure warning system not available at present) |
II. Cách nhận biết làn đường:
– Cần phải đáp ứng các điều kiện môi trường xung quang và chế độ các hệ thống khác nhau để hệ thống cảnh báo làn đường khởi hành có thể chuyển sang chế độ hoạt động.
1. Các tiêu chí đảm bảo điều kiện vận hành hệ thống giữu làn đường:
a. Tiêu chí hệ thống bên trong:
- Hệ thống giữ làn đường được bật và hoạt động.
- Các điều kiện vận hành tiêu chuẩn về điện áp được đáp ứng (điện áp tối thiểu, nhiệt độ).
- Giao tiếp với các hệ thống liên quan thông qua CAN bus dữ liệu được đưa ra (Ví dụ: ABS/ ESP hệ thống, tay lái trợ lực cơ điện, hệ thống tiện nghi, quản lý động cơ, kiểm soát đơn vị trong bảng dash,…) và các hệ thống khác đang làm việc.
- ESP (hệ thống cân bằng diện tử) phải được bật.
- Hệ thống cảnh báo làn đường khởi hành sẵn sàng hoạt động.
- Hệ thống sấy kính hoạt động.
b. Tiêu chí môi trường:
- Chiều rộng làn đường có thể ghi được nằm giữa 2,45 và 4,60 mét.
- Đánh dấu làn đường hoặc giới hạn làn đường có thể là được xác định bởi camera hệ thống cảnh báo.
- Khu vực ống kính của máy ảnh trên kính chắn gió không bẩn hoặc ố.
- Khoảng cách giữa hai vạch dấu làn đường liên tiếp được phát hiện có thể dài tối đa gấp đôi chiều dài của dấu.
- Ví dụ: Nếu hệ thống đã nhận diện rõ ràng việc đánh dấu trong phạm vi 5 mét, nó chấp nhận một phạm vi tiếp theo là 10 mét, trong đó không đánh dấu có thể được công nhận.Chỉ khi phạm vi dung sai này bị vượt quá thì hệ thống cảnh báo làn đường khởi hành chuyển sang chế độ thụ động.
2. Trình tự nhận dạng làn đường:
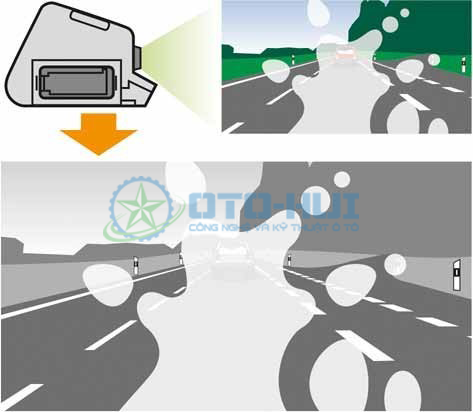
– Mỗi hình ảnh kỹ thuật số được máy ảnh ghi lại và kiểm tra bởi bộ xử lý cảnh báo làn đường cho những vùng giá trị trong thang màu xám, chẳng hạn như những dải gây ra bởi một dải trung tâm màu trắng trên lớp phủ nhựa đường tối.
– Để giảm thời gian xử lý, hệ thống cảnh báo hạn chế chính nó, khi đánh giá hình ảnh, đến hai khu vực hình thang ở bên trái và nửa bên phải của hình ảnh, trong đó dấu làn đường được nhận diện. Ngoài ra, mỗi 480 dòng hình ảnh, chỉ có một lựa chọn các dòng bên trong phạm vi phát hiện. Phương pháp này, cùng với hiệu suất bộ xử lý cao, có thể đảm bảo rằng đánh giá là thực hiện đủ nhanh, ngay cả ở tốc độ cao hơn, để nhận ra quá trình của con đường.
– Nếu chương trình đánh giá tìm thấy một hoặc nhiều giá trị thang màu xám mở rộng trong các dòng được chọn, hệ thống đặt điểm phát hiện hoặc đánh dấu tại mỗi vị trí này. Một số điểm đánh dấu có thể xảy ra trong một hàng.
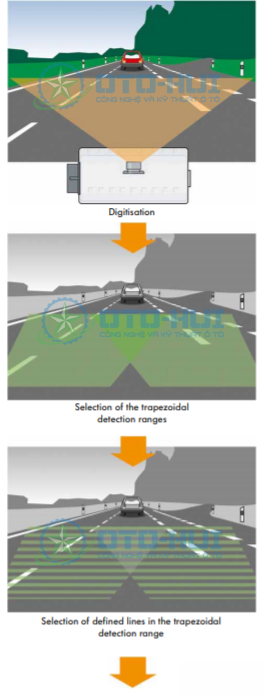
– Tuy nhiên, các điểm bên trong chỉ được sử dụng để tính toán làn đường riêng của xe nếu chúng có thể được tăng cường và xếp từng hàng để tạo thành một dòng ảo liên tục tương ứng với làn đường hoặc làn đường ranh giới.
– Nếu đủ điểm đánh dấu, có thể được tăng cường để tạo thành một đường liên tục, có thể được thiết lập, hệ thống cảnh báo làn đường khởi hành sử dụng các điểm đánh dấu đã được tìm thấy để tính toán đường thực sự..
– Hệ thống cảnh báo làn đường khởi hành sử dụng lộ trình được phát hiện, tích hợp các giới hạn chức năng và an toàn được xác định bởi bộ xử lý, để tạo thành làn đường ảo.
– Sử dụng dữ liệu hình ảnh đã được thu thập, hệ thống cảnh báo làn đường khởi hành tính toán hướng của phương tiện sang làn đường ảo.

– Nếu phương tiện tiếp cận hoặc vượt qua làn đường ảo này, hệ thống cảnh báo sẽ tiến hành điều chỉnh tay lái.
– Nếu sự khác biệt về giá trị thang màu xám trong hình ảnh kỹ thuật số quá nhỏ hoặc không có đủ điểm đánh dấu, để hệ thống có thể xác định đường đi, hoặc được thiết lập, hệ thống cảnh báo chuyển sang chế độ thụ động, trong đó không có cảnh báo hoặc điều chỉnh xảy ra. Tuy nhiên, nó tiếp tục đánh giá các hình ảnh đến để ngay lập tức kích hoạt lại hệ thống khi ranh giới làn đường có thể được nhận ra rõ ràng.

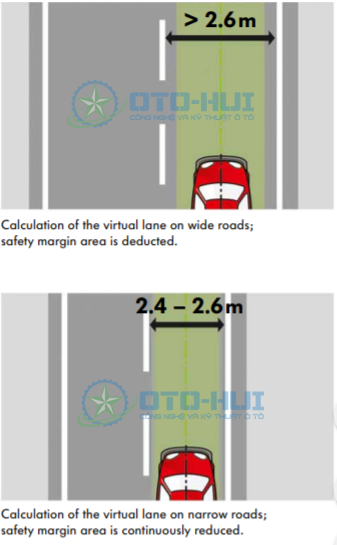
3. Tính toán làn đường ảo:
– Điều kiện giới hạn để tính toán làn đường ảo linh hoạt và được định hướng theo chiều rộng của đườn
Ví dụ:
- Nếu hệ thống phát hiện một chiều rộng đường ít nhất là 2,6 mét, và một khu vực lề an toàn là bốn mươi centimét được khấu trừ từ đường ranh giới thực sự đã được phát hiện. Nếu đường được phát hiện hẹp hơn 2,6 m, khu vực lề an toàn sẽ được khấu trừ liên tục giảm khi chiều rộng của đường giảm. Nếu chiều rộng của con đường giảm xuống dưới 2,4 m, hệ thống cảnh báo làn đường khởi hành sẽ chuyển sang chế độ thụ động.
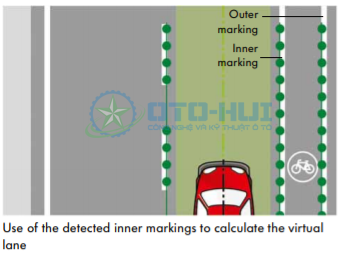
– Nếu tìm thấy một số dấu song song trên đường, ví dụ trong khu vực xây dựng hoặc trong trường hợp đường có phần đường dành cho xe máy, hệ thống sử dụng các điểm đã được đánh dấu bên trong nếu nó có thể được sử dụng để tính toán một làn đường ảo đủ rộng.
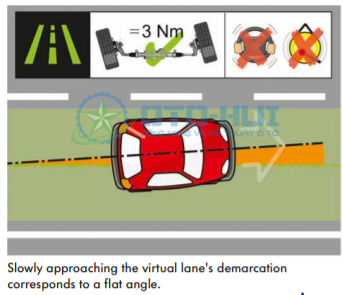
– Tính toán mô men xoắn điều chỉnh cần thiết. 3Nm là tối đa, thay đổi linh hoạt và hướng tới góc mà xe đang di chuyển về phía được công nhận, phân làn đường ảo. Hệ thống cảnh báo làn đường khởi hành sử dụng trục dọc của chính phương tiện và tâm của làn đường ảo để tính góc này.
– Nếu xe di chuyển về phía giới hạn làn đường 1 cách từ từ góc rộng, mô-men xoắn cực đại 3Nm là được áp dụng chỉnh lại hành trình của xe. Tuy nhiên, nếu người lái1 xe muốn rời khỏi làn đường và vượt qua sự phân giới của làn đường, một mô-men xoắn ngược là đủ để vượt qua sự điều chỉnh của trợ lực lái điện.
– Nếu xe di chuyển về phía ranh giới của làn đường ở một góc nhọn, hệ thống sẽ kết thúc. Ví dụ người lái xe có ý thức muốn rời khỏi làn đường mà không đặt tín hiệu rẽ. Trong trường hợp này, một mô-men xoắn nhẹ là đủ để ghi đè lên các mô men điều chỉnh.
Hệ thống điều chỉnh góc lái
– Điều kiện giới hạn để tính toán làn đường ảo linh hoạt và được định hướng theo chiều rộng của đường
III. Giới hạn của hệ thống:
– Ánh sáng (kém, đường tối,..), điều kiện thời tiết (ướt, nhựa đường bị đùn, đất, tuyết,.. che đường kẻ đường) và tầm nhìn xa trên đường (kính chắn gió bị bẩn, mờ ảnh hưởng đến camera,…):
- Nếu xảy ra có thể dẫn đến trường hợp hệ thống cảnh báo chệch làn đường không thể nhận biết phần đường rõ ràng và tính toán phần làn đường ảo hoặc có thể xảy ra sự nhầm lẫn làn đường của hệ thống cảnh báo.
- Trong trường hợp này, hệ thống thường tự động chuyển sang chế độ bị động.

– Trạng thái hoạt động chủ động chỉ có thể kích hoạt khi hệ thống nhận được thông tin rõ ràng, từ đó phần làn đường ảo có thể được tính toán trong khả năng của hệ thống.
Bài viết liên quan:
- Hệ thống khởi hành ngang dốc hoạt động như thế nào?
- Cách sử dụng hệ thống kiểm soát hành trình
- Cơ sở lý thuyết của hệ thống cân bằng điện tử ESP