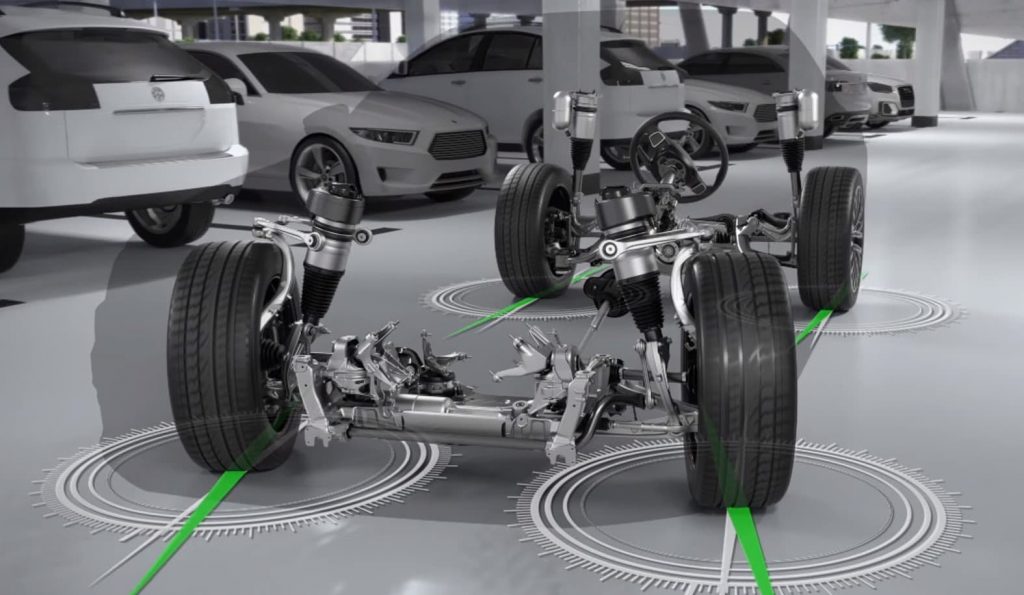
(New.otohui-com) – Hệ thống Four Wheel Steering là công nghệ dẫn động được phát triển bởi rất nhiều hãng xe. Hệ thống giúp mang lại sự ổn định và êm ái cho hành khách trong quá trình xe đánh lái. Vậy tại sao xe lại ổn định hơn khi có cả bốn bánh xe dẫn hướng? Các yếu tố nào có thể tác động lên chiếc xe để duy trì độ ổn định khi vào cua? Hãy cùng tìm hiểu và giải quyết các vấn đề này qua cái nhìn động lực học ô tô.

1. Điều kiện vận hành:
Hệ thống bốn bánh xe dẫn hướng được biết là được vận hành bằng việc thêm một hệ thống lái cho các bánh xe cầu sau. Điều này giúp bánh xe cầu sau có thể thay đổi các góc độ phù hợp khi đánh lái và điều đó cũng góp phần tạo cảm giác an toàn khi vào cua
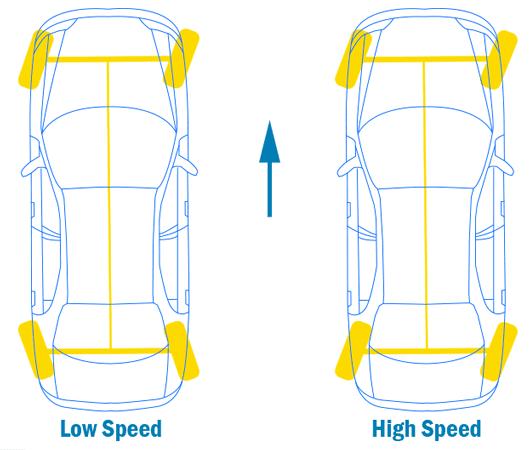
Khi chạy tốc độ cao bánh xe cầu sau đánh lái cùng hướng với bánh xe cầu trước. Và với tốc độ thấp bánh xe cầu sau đánh lái ngược hướng với bánh xe cầu trước. Điều này đó tạo nên hai ưu điểm của hệ thống 4WS trên ô tô:
- Đầu tiên là giảm bán kính quay vòng của xe. Điều này rất hữu ích giúp tăng khả năng cơ động ở tốc độ thấp chủ yếu trong khu vực đỗ xe hoặc đánh lái chậm quanh các khúc cua hẹp. Bán kính quay vòng giảm nhưng không thích hợp để lái xe tốc độ cao vì nó làm giảm độ ổn định.
- Thứ hai để thực hiện 4WS là để tăng độ ổn định ở tốc độ cao và khả năng vận hành của xe bằng cách quay bánh sau cùng chiều với bánh trước.
Khi xe đánh lái vào cua có những yếu tố tạo nên sự mất ổn định có thể kể đến như các thành phần lực tác dụng – lực ngang và lực ly tâm, vận tốc của phương tiện và bán kính quay vòng của phương tiện. Từ những yếu tố trên hệ thống dẫn động bốn bánh có hai yếu tố chính tạo nên sự ổn định của hệ thống 4WS là thành phần lực ngang và chiều dài lái Ls.
2. Lực ngang tại các bánh xe dẫn hướng
Các bánh xe là những thành phần chịu tác dụng chính từ mặt đường tác dụng lên xe cho nên nó chịu nhiều thành phần lực không mong muốn và điều đó là vấn đề đối với điều kiện vận hành của xe. Việc hiểu được thành phần lực ngang của bánh xe dẫn hướng sẽ tạo thêm nhiều cơ sở giải thích cho nhiều hiện tượng ổn định của xe sau này.
Lực ngang lực chỉ sinh ra khi điều kiện vận hành của các bánh xe là khác nhau, ví dụ độ mấp mô mặt đường khác nhau, áp suất lốp tại các bánh xe khi di chuyển cũng là khác nhau hoặc khi xe đánh lái, vận tốc tại bánh lái phía trong và phía ngoài cũng là khác nhau. Đó là những nguyên nhân chính gây ra lực ngang tại bánh xe và thân xe.
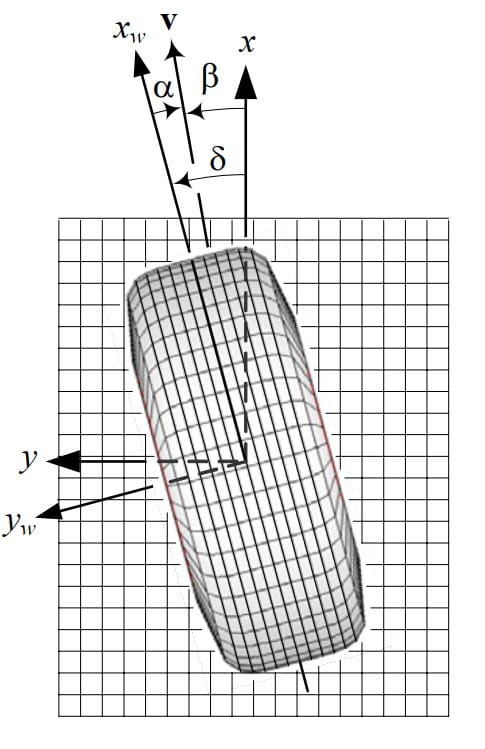
Khi xe vào cua, hiện tượng tải trọng quán tính sẽ bị dồn đến các bánh xe dẫn hướng. Lý do được đưa ra là vì khối lượng và vận tốc chuyển động thẳng. Khi đổi hướng, xe vẫn có xu hướng đẩy về phía trước do quán tính của xe, điều này làm cho bánh xe dẫn hướng không đạt được góc lái cần thiết.
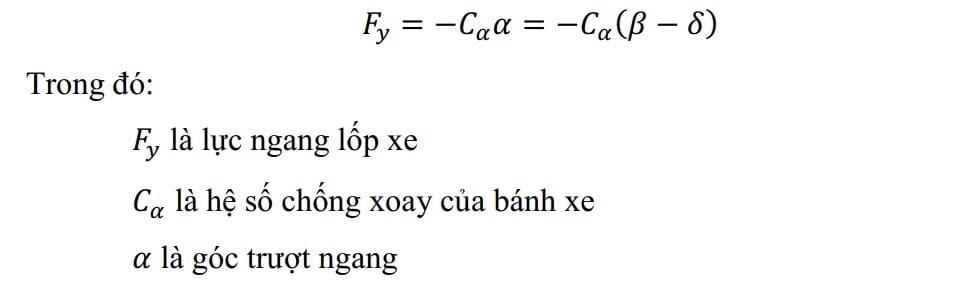
Cụ thể hơn là vectơ vận tốc của bánh xe dẫn hướng bị lệch một góc Alpha so với chuyển động lý tưởng của bánh xe. Do đó trong công thức tính lực ngang biểu thị dấu âm cho điều này. Và trong thực tế nó đã tạo nên lực ngang hướng về cùng chiều của góc lái (ví dụ xe đánh lái qua bên trái sẽ có lực ngang hướng về phía bên trái và ngược lại).
Áp dụng cho điều kiện vận hành thực tế của hệ thống 4WS ta có thể giải thích rằng. Khi xe chạy tốc độ cao, bánh sau đánh lái cùng hướng với bánh xe dẫn hướng, do đó lực ngang tại các bánh xe sau sẽ hướng vào phía trong của đường cua.
Lúc này lực ly tâm rất lớn do vận tốc cao nhưng lực ngang lại có chiều ngược lại với lực ly tâm. Nó giúp ổn định phần đuôi xe khi vào cua, tránh gây ra hiện tượng lật xe và giúp người lái vào cua mượt mà hơn, nhanh hơn rất nhiều và nó đặc biệt hữu dụng khi chuyển làn trên cao tốc.
- Để hiểu thêm về lực ly tâm và lực ngang hãy tham khảo bài viết: Phân tích hiện tượng lật xe ở ô tô.
3. Chiều dài lái Ls:
Để tìm hiểu vấn đề này chúng ta hãy cùng tìm hiểu về động lực học lái Ackerman. Để các bánh xe không bị trượt lết hoặc trượt quay thì đường vuông góc với các vectơ vận tốc chuyển động của các bánh xe phải gặp nhau tại một điểm – đó là tâm quay vòng tức thời của xe O. Điều kiện này khá phổ biến và giúp chúng ta tạo ra một tâm quay của xe khi vào cua.
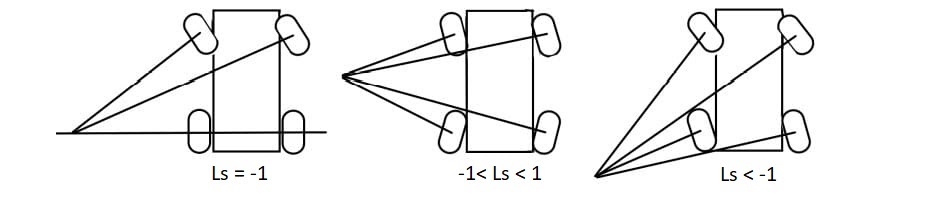
Chiều dài lái Ls được xác định trên hình học bằng các giả sử tâm quay O chỉ di chuyển lên xuống do sự thay đổi góc lái tương ứng và cùng lúc của cả bánh trước và bánh sau trong điều kiện vận hành. Đối với xe bốn bánh dẫn động:
- Ls nằm trong khoảng -1 đến 1 khi cầu trước và cầu sau lái ngược hướng.
- Ls > 1 khi cả cầu trước và cầu sau cũng đánh lái bên phải.
- Ls < -1 khi cả cầu trước và cầu sau cùng đánh lái qua bên trái.
Nó mang lại bán kính quay vòng nhỏ hơn rất nhiều so với hệ thống một cầu dẫn động. (Bán kính kính quay vòng là khoảng cách giữa tâm quay O và trọng tâm của xe).
Hãy cùng xem xét điều kiện khi xe vào cua với tốc độ thấp, bánh xe cầu sau đánh lái ngược hướng với bánh xe cầu trước sẽ tạo ra bán kính quay vòng nhỏ hơn giúp xe vào cua nhanh hơn.
Thêm vào đó do vận tốc và bán kính đều nhỏ nên lực ly tâm lúc này cũng thấp, nhưng do bánh sau dẫn hướng ngược nên tạo ra một lực ngang cùng chiều với lực ly tâm hỗ trợ đẩy đuôi xe ra ngoài vòng cua. Do đó giúp xe vào cua nhanh hơn gọn hơn và góc đánh lái của tài xe cũng ít hơn nhờ sự hỗ trợ của dẫn hướng cầu sau.
Bài viết liên quan:
- Lợi ích của hệ thống 4 bánh dẫn hướng
- Hãng xe nào đang sử dụng hệ thống lái 4 bánh 4WS (AWS)?
- Four Wheels Steering – Mảnh ghép còn thiếu cho dòng xe Hatchback