
(News.oto-hui.com) – Four-wheel steering hay 4WS đều là tên gọi của hệ thống 4 bánh dẫn hướng (đối với xe du lịch). Hệ thống này cung cấp cho phương tiện sự linh hoạt trong khi chuyển hướng bởi vì các bánh xe sau có thể chủ động điều khiển được – một hệ thống dùng cả 4 bánh để điều khiển xe. Góc đánh lái thông thường được giới hạn từ 2 đến 3 độ.
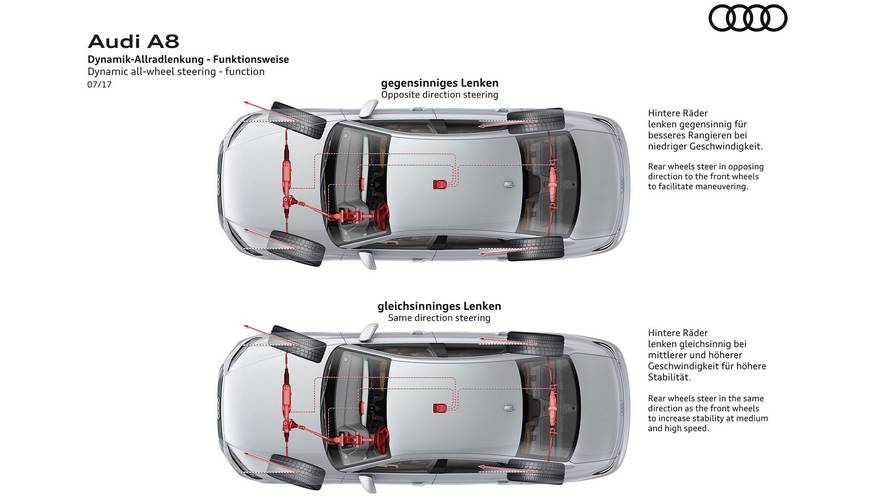
Điều khiển các bánh xe sau theo hướng ngược lại so với bánh trước ở tốc độ thấp giúp cho xe linh hoạt hơn & giảm bán kính quay vòng đáng kể. Điều khiển các bánh xe sau theo hướng giống với bánh trước ở tốc độ cao cho phép thay đổi làn đường đột ngột với độ ổn định cao và giúp đổ xe song song dễ dàng hơn rất nhiều. Hệ thống 4 bánh dẫn hướng là một công nghệ tương đối mới giúp tăng tính linh hoạt của ô tô, xe tải và xe rơ-mooc.
Chức năng:
- Cung cấp sự dẫn hướng ổn định của một chiếc xe
- Tạo điều kiện cho sự “phục hồi” chuyển động thẳng tiến.
- Hạn chế tối đa sự ăn mòn lốp.
- Hấp thụ dao động chính từ mặt đường
- Cung cấp chuyển động lăn hoàn hảo cho bánh xe.
Yêu cầu:
- Hệ thống lái phải có khả năng điều khiển bánh trước thay đổi đột ngột – nhanh chóng nhưng đảm bảo sự dễ dàng & trơn tru.
- Tay lái được làm nhẹ hơn ở tốc độ thấp và nặng hơn ở tốc độ cao.
- Phục hồi trơn tru trong khi xe đang rẽ.
- Hạn chế sự truyền sốc tối thiểu từ mặt đường.
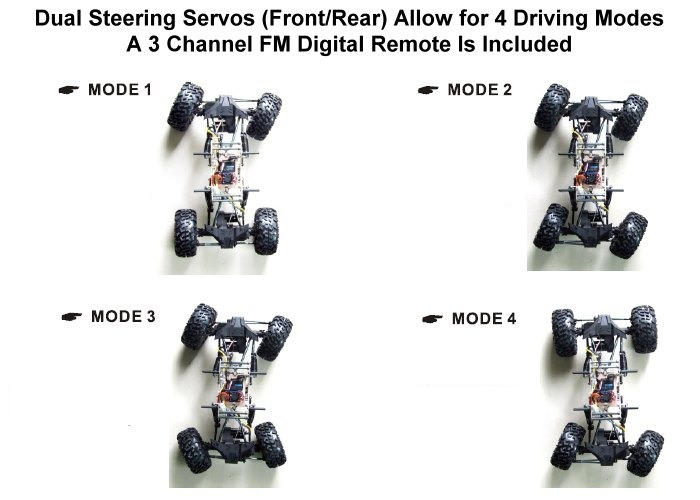
Chế độ hoạt động của 4WS:
1. 2 bánh dẫn hướng:
- Hệ thống lái 4 bánh đủ linh hoạt để hoạt động như 2 bánh dẫn hướng bằng cách hạn chế hoạt động dẫn hướng của các bánh sau
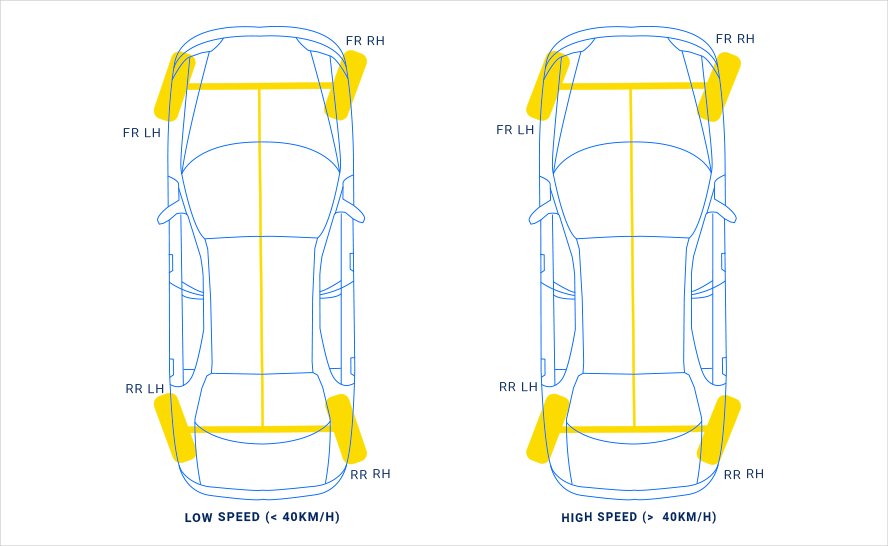
2. Chế độ rẽ / vào cua ở tốc độc cao:
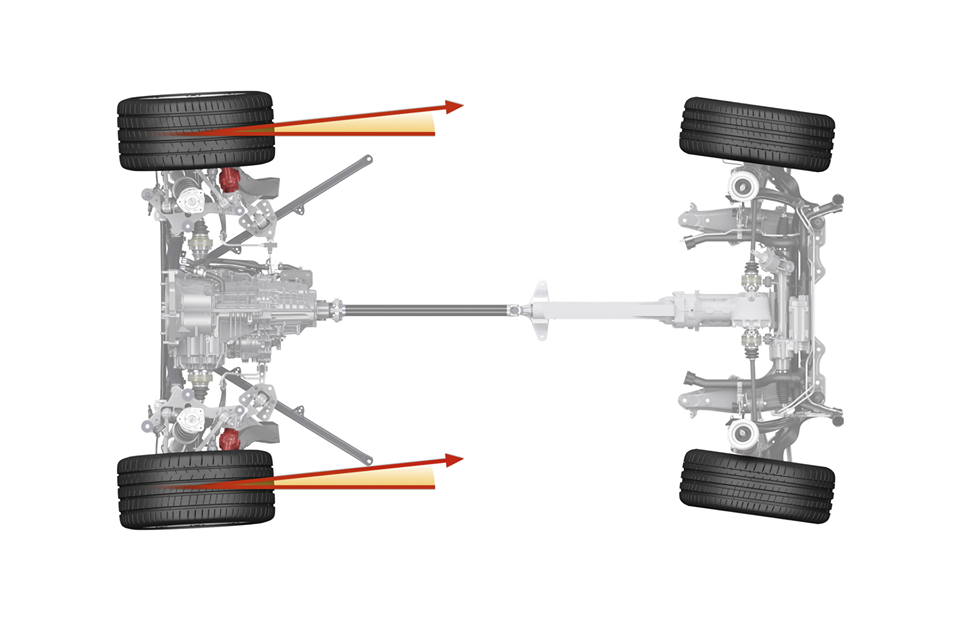
- Khi chuyển hướng ở tốc độ cao, bề mặt bánh xe trước & sau ở cùng một hướng. Ở tốc độ cao, thay đổi hướng bánh xe sau một góc ngược với bánh xe trước có thể dẫn đến mất ổn định xe nên không phù hợp. Do đó, tốc độ trên 40 km/h, các bánh xe sau đổi hướng theo hướng của các bánh xe trước trong hệ thống 4 bánh dẫn hướng.
3. 4 bánh dẫn hướng / tốc độ chậm:
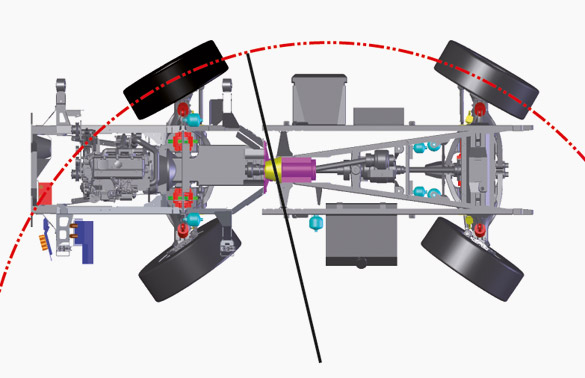
- Hướng của bánh trước ngược với hướng của bánh sau, giúp xe chuyển hướng đột ngột với bán kính quay vòng nhỏ nhất. Nó có thể làm giảm bán kính quay vòng đi 25% và có hiệu quả trong điều kiện thành phố tắc nghẽn, nơi quay đầu hoặc các đường nhỏ hẹp được điều hướng dễ dàng hơn.
4. Không đánh lái:
- Bánh trước và sau được căn chỉnh sao cho phương tiện di chuyển hướng thẳng.
Ứng dụng:
- Đỗ xe: Trong quá trình đỗ xe, người lái thường xoay vô lăng theo một góc lớn để đạt được bán kính quay vòng nhỏ. Bằng cách điều khiển ngược hướng bánh sau để quá trình chuyển hướng được dễ dàng hơn, sau đó trở về chế độ 2 bánh trước dẫn hướng.
- Tại giao lộ: Ở ngã 3 hoặc ngã 4, nơi đường giao nhau 1 góc 90 độ hoặc ngoặt hơn. Việc điều khiển bánh sau ngược hướng với bánh trước giúp chiếc xe bám cua nhiều hơn hoặc ít hơn dễ dàng.
- Bề mặt đường trơn: Khi lái ở điều kiệu bề mặt trơn trượt, sự dẫn hướng của bánh sau ngăn chặn sự mất ổn định của phần đuôi xe. Do đó, hướng của xe dễ kiểm soát hơn.
- Vận hành đường thẳng ở tốc độ cao: Khi chạy trên đường thẳng ở tốc độ cao, người lái thường xuyên phải điều khiển nhẹ tay lái để duy trì hướng mong muốn. Hệ thống 4WS với việc điều khiển hướng các bánh xe sau sẽ giảm sự hiệu chỉnh này.
- Đường đèo, hẹp: Ở đường đèo, hẹp với những khúc cua gắt gao, việc điều khiển ngược hướng các bánh sau giúp giảm bán kính quay vòng xe, từ đó giảm số vòng quay của vô lăng giúp người lái dễ điều khiển & xe dễ rẽ hơn.
Ưu điểm
- Hiệu suất & độ ổn định quay vòng cao.
- Cải thiện độ nhạy, chính xác & trơn tru của hệ thống lái.
- Ổn định khi di chuyển trên đường thẳng với tốc độ cao.
- Cải thiện đáng chú ý trong chuyển làn nhanh, dễ dàng & an toàn hơn.
- Giảm bán kính quay vòng & linh hoạt ở tốc độ thấp
Bài viết liên quan:
- Giải thích các khái niệm cầu xe, dẫn động 4WD, AWD, 4×4, 4×2… là gì?
- Ưu và nhược điểm của các kiểu hệ thống dẫn động trên ô tô
- Phân loại và nguyên lý hoạt động của các loại hệ thống dẫn động 4WD cơ bản
[…] =>>> Xem thêm: Lợi ích của hệ thống 4 bánh dẫn hướng […]